ИК- PIR для обнаружения перемещения человека
Статьи публикуются по мере поступления. Для упорядоченного тематического
поиска воспользуйтесь блоком "Карта сайта"
Чтобы построить этот прибор, использовал микроконтроллер PIC18F25K20. Датчики PIR позволяют ощущать движение, почти всегда используемое для определения того, перемещался ли человек внутрь или из диапазона датчиков. Они маленькие, недорогие, маломощные, просты в использовании и не изнашиваются. По этой причине они обычно находятся в приборах и гаджетах, используемых в домах или на предприятиях. PIRы в основном сделаны из пироэлектрического датчика, который может обнаруживать уровни инфракрасного излучения. Датчик в детекторе движения фактически разделен на две половины. Причина этого заключается в том, что мы надеемся обнаружить движение (изменение), а не средние уровни IR. Обе половинки соединены проволокой так, что они взаимно компенсируют друг друга. Если одна половина видит больше или меньше ИК-излучения, чем другая, выход будет качаться высоко или низко.

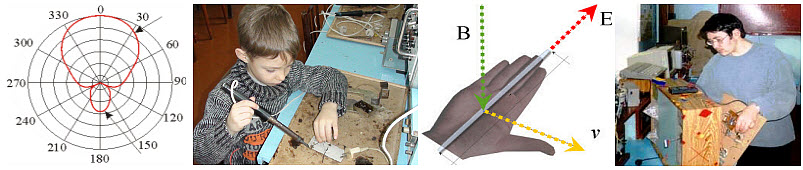
Датчик PIR, который использовал в этой схеме
Схема

Использую 9-вольтовую батарею, и она подключается к коммутатору, и в качестве регулятора напряжения я использую L317T, и у него выход 3,3 В. Я использую два резистора R1 и R2, чтобы установить выходной сигнал. Для вычисления R1 и I устанавливают R2 на 240 Ом по формуле:

POR (сброс при включении питания)
Мне пришлось добавить RC-задержку на вывод VPP, потому что когда я включаю / выключаю схему, происходит падение напряжения, потому что датчик PIR будет генерировать неизвестное состояние, когда MCU перезапущен, чтобы решить, что я добавляю задержку RC. Вы можете использовать эти формулы для вычисления задержки

Также использую 8-омный динамик, но вы можете использовать пьезоэлектрический преобразователь, я использую транзистор BC338 (Q1), чтобы звук не был слишком громким и с этим транзистором я получил HFE = 35. Вы можете вычислить ic с этимуравнением.

PIR-датчик работает только с 3,3 В, как MCU, поэтому он подключается к выходу LM317T, он может подключаться к напряжению от 8 до 24 В, потому что я использую батарею 9 В, а если батарея становится ниже 8 В, то датчик PIR не будет работать. Vout датчика подключен к PORTB.0, и когда это произойдет, это вызовет прерывание, для которого использую сбрасывающий резистор, чтобы убедиться, что PORTB.0 находится в низком состоянии. Требуется от 10 до 12 секунд, чтобы вызвать другое прерывание, и диапазон составляет от 2 до 3 метров. Имеются графики этого датчика и задержки.

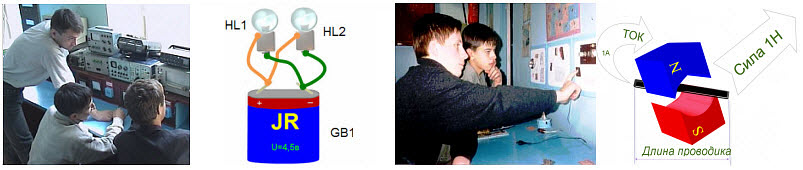
При запуске загораются оба светодиода, а затем он проверяет батарею, если хорошо Led1 (зеленый) включается / выключается три раза, если батарея разряжена Led2 (синий) включается / выключается три раза, включается Led1 (Зеленый) если PORTB.0 не изменяет состояние, цепь останется неизменной до тех пор, пока не произойдет изменение. Когда произойдет изменение, это означает, что датчик обнаруживает некоторое движение и прерывание произойдет, и Led1 выключится и Led2 включится (звук будет генерироваться в течение 5 секунд), а затем Led2 выключится и вернется в исходное состояние.
Печатная плата


Компоновка элементов
Просмотров: 1781 |
Добавил: Chinas
| Рейтинг: 0.0/0
|