










































2WD электрический автомобиль с Arduino
Вы когда-нибудь хотели, построить себе 2WD электрический автомобиль и управлять им без проводов, особенно через Android приложения? В этой статье, я хочу поделиться некоторыми наработками которые помогут сделать ваш собственный 2WD электрический автомобиль.
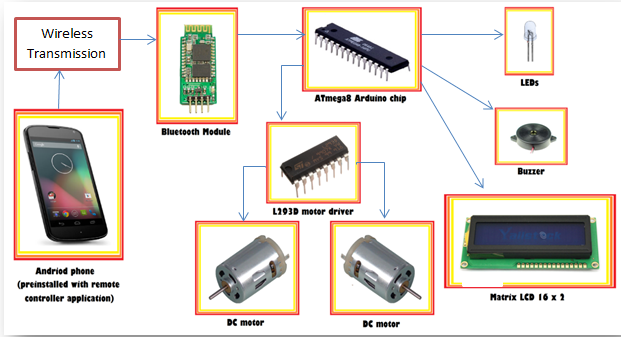
Блок-схема для проектирования электромобиля
Необходимые детали
- 1 х ATMega8
- 1 х драйвер двигателя L293D
- 1 х HC-05 модуль Bluetooth
- 1 х 16 МГц кварц
- 1 х AMS 1117 5V линейный регулятор напряжения
- Двигатель 2 х DC
- 2 х 3,7 батареи
- Держатель 1 х батареи
- 1 х ЖК 16 × 2 с голубой подсветкой
- 6 х светодиодов
- 1 х 660Ω резистор
- 2 х 0.1μF
- 2 х 10 мкФ
- 2 х 22μF
- 1 зуммер
- 1 х SPDT переключатель
- 1 х разъем питания постоянного тока 2.1mm

Принципиальная схема
Как вы можете видеть из схемы, конструкция разделена на несколько разделов:
Раздел 1: Питание с помощью регулятора напряжения AMS1117-5V с низкой отсевом напряжения по сравнению с общей LM7805. Технический паспорт AMS1117-5V
Раздел 2:. Микроконтроллер (Atmega8 / Atmega 328) для управления всей работой автомобиля
Раздел 3: L293D контроллер двигателя. Цель использования этой IC, чтобы управлять направлением двигателя, а также скоростью вращения. L293D паспорт
Раздел 4: ЖК-дисплей для отображения текущего состояния. Например, "Вперед", "Реверс" и любые сведения, которые вы хотели бы отобразить.
Раздел 5: Bluetooth-модуль, будет получать последовательные данные, передаваемые с мобильного телефона.
Режиы раблты L293D для лучшего понимания конфигурации контактов.

Высокое ~ + 5В, низкий ~ 0 В, Х = высокий или низкий.
В приведенной выше таблице истинности можно заметить, что если контакт 1 (Е1) является низким, то двигатель останавливается, независимо от состояния Pin 2 и Pin 7. Следовательно, необходимо привести E1 в высокое состояние, или просто подключить к выводам до 5 вольт.
Контакт 1 имеет высокий уровень, если контакт 2 высокий, а контакт 7 низкий. Тогда 7 привод электродвигателя будет вращаться в направлении против часовой стрелки. Если состояния Pin 2 и Pin 7 перевернуты, то ток течет от контакта к контакту 7 к контакту 2. привода двигателя будет вращаться по часовой стрелке. Аналогично работает другое плечо той же IC. Ниже простое объяснение, как вы должны подключить модуль Bluetooth к микроконтроллеру.

Теперь я представляю простую в использовании платформу для разработки своих первых андроид приложений - MIT App Inventor .

Скачать андроид приложения:
Код Arduino базируется на основе концепции последовательной связи.
Когда микроконтроллер получает последовательные данные, то он будет выполнять конкретные задачи запрограммированые пользователем. Например, когда последовательные данные получили "1", то автомобиль будет двигаться вперед. Ну вот и все. Теперь вы можете сделать свой собственный электрический автомобиль 2WD контролируемый от вашего Android телефона!



