









































Беспроводное управление сервомотором на Arduino
В этой статье мы собираемся построить схему беспроводного сервомотора, которая может управлять 6 сервомоторами без проводов по линии связи 2,4 ГГц.
Проект разделен на две части: передатчик с 6 потенциометрами и приемный контур с 6 сервомоторами. Пульт дистанционного управления имеет 6 потенциометров для управления 6 отдельными сервомоторами независимо от приемника. Вращая потенциометр, можно контролировать угол серводвигателя. Предлагаемая схема может использоваться там, где вам необходимо управлять движением, например, рычагом управления движением робота или переднего колеса автомобиля RC. Сердцем схемы является модуль NRF24L01, который является приемопередатчиком; он работает на полосе ISM (промышленная, научная и медицинская группа), это та же полоса частот, что и ваш WI-FI.

Он имеет 125 каналов, имеет максимальную скорость передачи данных 2 Мбит / с и имеет теоретический максимальный диапазон 100 метров. Для создания линии связи вам понадобятся два таких модуля.
Конфигурация контактов:
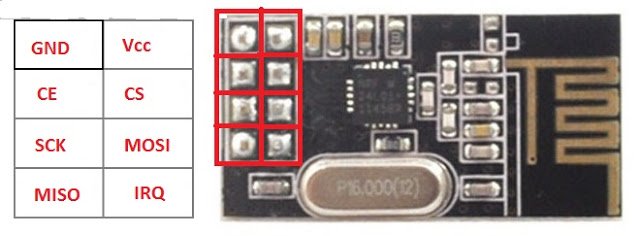
Он работает на протоколе связи SPI. Вам нужно подключить 7 из 8 контактов к Arduino, чтобы этот модуль работал. Он работает на 3,3 В, а 5В убивает модуль, поэтому при питании следует соблюдать осторожность. К счастью, у нас есть на регуляторе напряжения 3,3 В на Arduino, и он должен питаться только от розетки 3,3 В от Arduino.
Теперь перейдем к схеме передатчика.
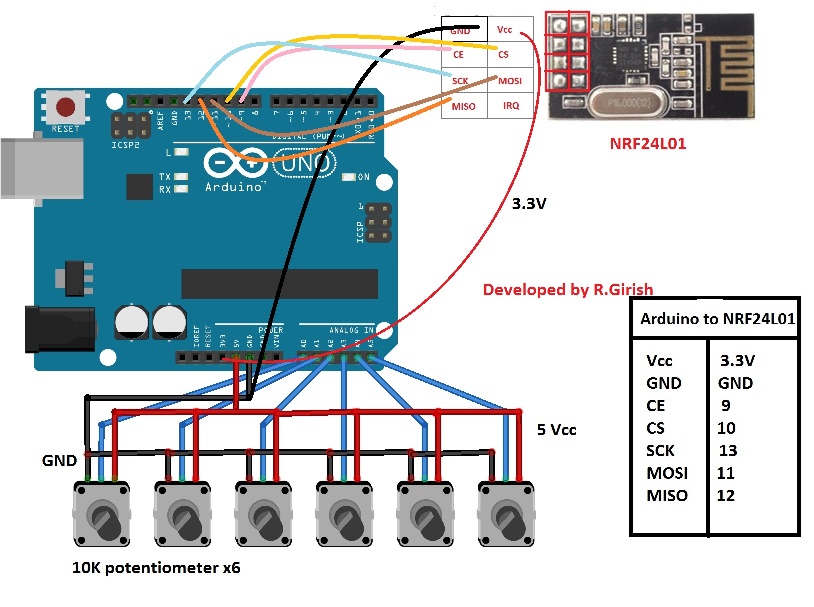
Схема состоит из 6 потенциометров с величиной 10 К ом. Средний вывод 6 потенциометров подключается к аналоговым входным контактам A0-A5. Табуляция дается рядом с схемой для NRF24L01 для соединения Arduino; вы можете обратиться, если у вас есть путаница в электрической схеме. Эта схема может питаться от USB или 9V аккумуляторов через гнездо постоянного тока.
Загрузите файл библиотеки здесь: github.com/nRF24/
Программа для передатчика:
//----------------------Program Developed by R.Girish------------------------//
#include <nRF24L01.h>
#include <RF24.h>
#include<SPI.h>
RF24 radio(9,10);
const byte address[6] = "00001";
#define pot1 A0
#define pot2 A1
#define pot3 A2
#define pot4 A3
#define pot5 A4
#define pot6 A5
const int threshold = 20;
int potValue1 = 0;
int potValue2 = 0;
int potValue3 = 0;
int potValue4 = 0;
int potValue5 = 0;
int potValue6 = 0;
int angleValue1 = 0;
int angleValue2 = 0;
int angleValue3 = 0;
int angleValue4 = 0;
int angleValue5 = 0;
int angleValue6 = 0;
int check1 = 0;
int check2 = 0;
int check3 = 0;
int check4 = 0;
int check5 = 0;
int check6 = 0;
const char var1[32] = "Servo1";
const char var2[32] = "Servo2";
const char var3[32] = "Servo3";
const char var4[32] = "Servo4";
const char var5[32] = "Servo5";
const char var6[32] = "Servo6";
void setup()
{
Serial.begin(9600);
radio.begin();
radio.openWritingPipe(address);
radio.setChannel(100);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_MAX);
radio.stopListening();
}
void loop()
{
potValue1 = analogRead(pot1);
if(potValue1 > check1 + threshold || potValue1 < check1 - threshold)
{
radio.write(&var1, sizeof(var1));
angleValue1 = map(potValue1, 0, 1023, 0, 180);
radio.write(&angleValue1, sizeof(angleValue1));
check1 = potValue1;
Serial.println("INPUT:1");
Serial.print("Angle:");
Serial.println(angleValue1);
Serial.print("Voltage Level:");
Serial.println(potValue1);
Serial.println("----------------------------------");
}
potValue2 = analogRead(pot2);
if(potValue2 > check2 + threshold || potValue2 < check2 - threshold)
{
radio.write(&var2, sizeof(var2));
angleValue2 = map(potValue2, 0, 1023, 0, 180);
radio.write(&angleValue2, sizeof(angleValue2));
check2 = potValue2;
Serial.println("INPUT:2");
Serial.print("Angle:");
Serial.println(angleValue2);
Serial.print("Voltage Level:");
Serial.println(potValue2);
Serial.println("----------------------------------");
}
potValue3 = analogRead(pot3);
if(potValue3 > check3 + threshold || potValue3 < check3 - threshold)
{
radio.write(&var3, sizeof(var3));
angleValue3 = map(potValue3, 0, 1023, 0, 180);
radio.write(&angleValue3, sizeof(angleValue3));
check3 = potValue3;
Serial.println("INPUT:3");
Serial.print("Angle:");
Serial.println(angleValue3);
Serial.print("Voltage Level:");
Serial.println(potValue3);
Serial.println("----------------------------------");
}
potValue4 = analogRead(pot4);
if(potValue4 > check4 + threshold || potValue4 < check4 - threshold)
{
radio.write(&var4, sizeof(var4));
angleValue4 = map(potValue4, 0, 1023, 0, 180);
radio.write(&angleValue4, sizeof(angleValue4));
check4 = potValue4;
Serial.println("INPUT:4");
Serial.print("Angle:");
Serial.println(angleValue4);
Serial.print("Voltage Level:");
Serial.println(potValue4);
Serial.println("----------------------------------");
}
potValue5 = analogRead(pot5);
if(potValue5 > check5 + threshold || potValue5 < check5 - threshold)
{
radio.write(&var5, sizeof(var5));
angleValue5 = map(potValue5, 0, 1023, 0, 180);
radio.write(&angleValue5, sizeof(angleValue5));
check5 = potValue5;
Serial.println("INPUT:5");
Serial.print("Angle:");
Serial.println(angleValue5);
Serial.print("Voltage Level:");
Serial.println(potValue5);
Serial.println("----------------------------------");
}
potValue6 = analogRead(pot6);
if(potValue6 > check6 + threshold || potValue6 < check6 - threshold)
{
radio.write(&var6, sizeof(var6));
angleValue6 = map(potValue6, 0, 1023, 0, 180);
radio.write(&angleValue6, sizeof(angleValue6));
check6 = potValue6;
Serial.println("INPUT:6");
Serial.print("Angle:");
Serial.println(angleValue6);
Serial.print("Voltage Level:");
Serial.println(potValue6);
Serial.println("----------------------------------");
}
}
//----------------------Program Developed by R.Girish------------------------//
Приемник
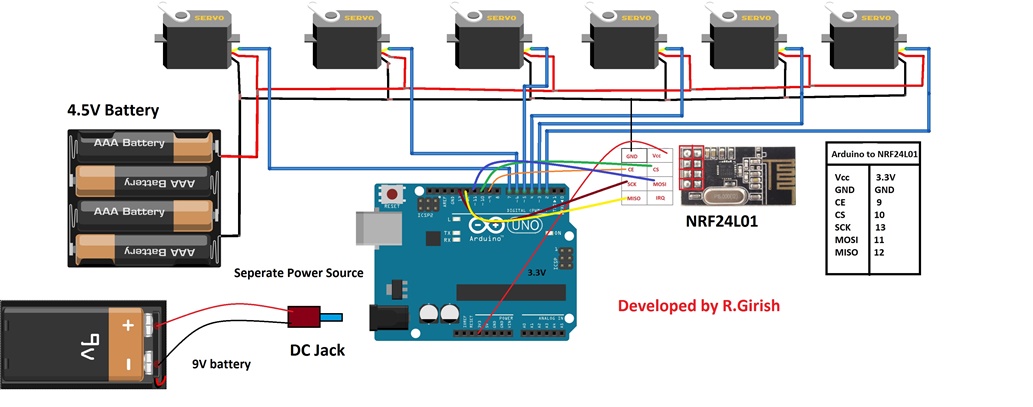
Схема приемника состоит из 6 сервомоторов, одного Arduino и двух отдельных источников питания. Для работы сервомоторов требуется более высокий ток, поэтому он не должен питаться от ардуино . Вот почему нам нужен два отдельных источника питания. Приложите напряжение к сервоприводу соответствующим образом; для микросервомоторов 4,8 В достаточно, если вы хотите подключить более громоздкие сервомоторы, примените соответствие напряжения к номиналу сервопривода. Пожалуйста, помните, что серводвигатель потребляет некоторую мощность даже тогда, когда нет момента, потому что рычаг серводвигателя всегда борется с любым изменением с его прокомментированной позиции.
Программа для приемника:
//----------------------Program Developed by R.Girish------------------------//
#include <nRF24L01.h>
#include <RF24.h>
#include<SPI.h>
#include<Servo.h>
RF24 radio(9,10);
const byte address[6] = "00001";
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
Servo servo5;
Servo servo6;
int angle1 = 0;
int angle2 = 0;
int angle3 = 0;
int angle4 = 0;
int angle5 = 0;
int angle6 = 0;
char input[32] = "";
const char var1[32] = "Servo1";
const char var2[32] = "Servo2";
const char var3[32] = "Servo3";
const char var4[32] = "Servo4";
const char var5[32] = "Servo5";
const char var6[32] = "Servo6";
void setup()
{
Serial.begin(9600);
servo1.attach(2);
servo2.attach(3);
servo3.attach(4);
servo4.attach(5);
servo5.attach(6);
servo6.attach(7);
radio.begin();
radio.openReadingPipe(0, address);
radio.setChannel(100);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_MAX);
radio.startListening();
}
void loop()
{
delay(5);
while(!radio.available());
radio.read(&input, sizeof(input));
if((strcmp(input,var1) == 0))
{
while(!radio.available());
radio.read(&angle1, sizeof(angle1));
servo1.write(angle1);
Serial.println(input);
Serial.print("Angle:");
Serial.println(angle1);
Serial.println("--------------------------------");
}
else if((strcmp(input,var2) == 0))
{
while(!radio.available());
radio.read(&angle2, sizeof(angle2));
servo2.write(angle2);
Serial.println(input);
Serial.print("Angle:");
Serial.println(angle2);
Serial.println("--------------------------------");
}
else if((strcmp(input,var3) == 0))
{
while(!radio.available());
radio.read(&angle3, sizeof(angle3));
servo3.write(angle3);
Serial.println(input);
Serial.print("Angle:");
Serial.println(angle3);
Serial.println("--------------------------------");
}
else if((strcmp(input,var4) == 0))
{
while(!radio.available());
radio.read(&angle4, sizeof(angle4));
servo4.write(angle4);
Serial.println(input);
Serial.print("Angle:");
Serial.println(angle4);
Serial.println("--------------------------------");
}
else if((strcmp(input,var5) == 0))
{
while(!radio.available());
radio.read(&angle5, sizeof(angle5));
servo5.write(angle5);
Serial.println(input);
Serial.print("Angle:");
Serial.println(angle5);
Serial.println("--------------------------------");
}
else if((strcmp(input,var6) == 0))
{
while(!radio.available());
radio.read(&angle6, sizeof(angle6));
servo6.write(angle6);
Serial.println(input);
Serial.print("Angle:");
Serial.println(angle6);
Serial.println("--------------------------------");
}
}
//----------------------Program Developed by R.Girish------------------------//
Как управлять этим проектом:
• Включите оба контура.
• Теперь поверните любую ручку потенциометра.
• Например, 3-й потенциометр, соответствующий сервопривод в приемнике вращается.
• Это относится ко всем серводвигателям и потенциометрам.
Примечание. Вы можете подключить передатчик к компьютеру и открыть последовательный монитор, чтобы увидеть данные, такие как угол серводвигателя, уровень напряжения на аналоговой выводе и какой потенциометр в настоящее время работает.




